Proč je synchronizace fotoaparátu tak důležitá?
Obvykle autopilot spustí kameru a zaznamená souřadnice, které v danou chvíli má. Když dron letí rychlostí 20 m/s a GPS pracuje s frekvencí 5 Hz, znamená to, že váš autopilot bude mít polohu pouze každé 4 m, což není vhodné pro přesné georeferencování. Navíc vždy existuje prodleva mezi spouští a skutečným okamžikem pořízení fotografie.
Reach eliminuje zpoždění
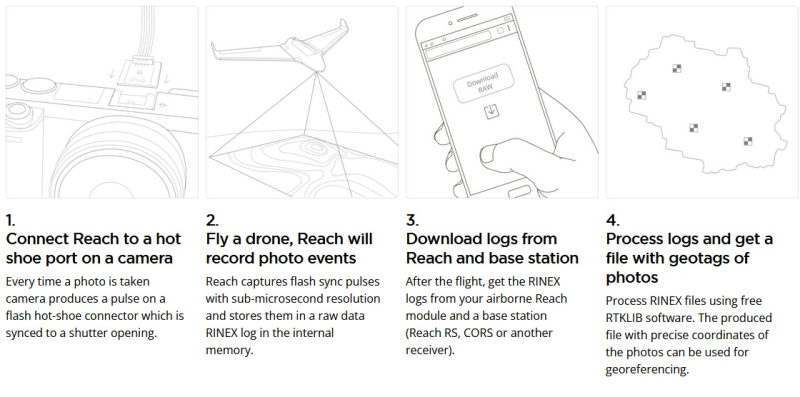
Reach řeší problém polohování připojením přímo k portu sáňky fotoaparátu, který je synchronizován se závěrkou. Čas a souřadnice každé fotografie jsou zaznamenány s rozlišením menším než mikrosekunda. Tato metoda umožňuje používat GCP pouze ke kontrole vaší přesnosti.
NTRIP nebo jiný Reach jako základní stanice
K výpočtu souřadnic s přesností na centimetry v PPK a RTK potřebuje Reach opravy ze základnové stanice. Může to být buď jiný přijímač Reach nebo služba NTRIP. Podporováno je také VRS.
Kompatibilita:
Reach M2 a M+ bezproblémově fungují s ostatními přijímači Reach přes jakékoli spojení a jsou kompatibilní s jakýmkoli jiným přijímačem, který podporuje RTCM3 a NTRIP.
Dodává se s aplikací ReachView 3
Uživatelsky nejpřívětivější software pro sběr dat, který je dostupný pro Android i iOS. Podporuje tisíce souřadnicových systémů a je přeložen do více jazyků. Pomocí ReachView 3 můžete ovládat všechny funkce přijímačů Reach, jako je nastavení základnové stanice, protokolování dat RINEX a konfigurace výstupu NMEA.
Reach M2 a Reach RS2+
Poskytuje robustní výkon a rychlou inicializaci, což umožňuje práci na dlouhých základnách.
- RTK do 60 km
- PPK do 100 km
- Čas na opravu 5 sekund
- Kmitočtová pásma - vícepásmová
- Rychlost aktualizace protokolování RINEX Až 10 Hz




 1x
EMLID - Reach M2
1x
EMLID - Reach M2
 1x
Micro-USB kabel
1x
Micro-USB kabel





 Rychlé dodání
Rychlé dodání
 Prodej, půjčovna, výkup, bazar
Prodej, půjčovna, výkup, bazar
 Veškeré služby a školení
Veškeré služby a školení
 Objednání k vyzkoušení na prodejně
Objednání k vyzkoušení na prodejně
 Poradna, testy, recenze, videa
Poradna, testy, recenze, videa
 Ověřeno zákazníky
Ověřeno zákazníky