ČVUT testuje autonomní loď a přistávání na vodě + video
5 minut čtení
Alexovy návštěvy u party inženýrů a vývojářů z ČVUT, z fakulty
elektrotechnické (FEL), jsou již pomalu legendární záležitostí. Letos
z jara jsme zveřejnili zážitky a poznatky
jedné z takových návštěv, při níž jsme nestačili žasnout nad
jejich aktuálními výtvory a celkovým posunem. Důležitou vývojovou
větví, která se tehdy řešila, bylo létání nad vodou, přistávání
dronu na vodě, případně na loď, ale také hledání a sběr odpadků
z vody. Jen pár měsíců uběhlo a drak Alex znovu vyrazil do terénu, aby
zkontroloval, kam se nejen tato větev nových technologií od ČVUT posunula.
A že se neposunula málo! Krom „lodní problematiky“ jsme se mohli podívat také na dron, který by mohl pomáhat lokalizovat kůrovce, a dokonce sám značit stromy jím zasažené. V neposlední řadě jsme nakoukli i do kuchyně dalšího vývoje technologií od party z ČVUT a jeho plánovaného směřování. Pojďme si to vše projít krok za krokem.
Autonomní loď-dron pro kontrolu kvality vody a sběr odpadků
Jedním z velkých technologických překvapení našeho posledního setkání s partou okolo ČVUT byla především autonomní loď, která na to, že jde o prvotní prototyp vypadala už dost vymakaně a vyšperkovaně.
Úvodní zvláštností je skutečnost, že tato loď nemá tradiční lodní šrouby ani kormidlo, jelikož ji pohání a směruje čtveřice karbonových vrtulí. Funguje tedy na podobném principu jako klasický dron, proto se i dost podobně ovládá a proto může její kontrolu obstarávat systém Pixhawk, který se běžně používá pro řízení modelů letadel a dronů. Ale vlastně proč ne, dron jako dron! Tenhle se akorát pohybuje jen v jedné rovině.
Vzdušný průzkumný dron nové generace s rámem a plováky
Smysl a funkci této lodi (dronu) lze rozdělit na 2 paralelní větve:
V jedné z nich slouží jako přistávací plocha a dokovací stanice pro létající průzkumný dron, který ze vzduchu kontroluje a vyhodnocuje cílovou vodní hladinu. Jeho úkolem je hledat odpadky, nebo třeba místa znečištění – olejové skvrny apod.
Plovoucí základna dronu se poté může sama dopravit na postižené místo, vylovit odpadky, analyzovat stav vody a provádět i jiné činnosti. Může také sloužit jako záchranný prostředek pro tonoucí hledající pověstné stéblo! Je totiž také vybavená záchrannými kruhy, které může v daném místě odhodit. Ale to je spíše krajní způsob jejího využití.
Plovoucí dron a jeho létající bratr na horní palubě
Droní pobřežní hlídka slouží 24/7
Vedle systému pohonu a způsobu řízení lodi založené na droním (vrtulovém) principu, je zajímavé i její další vybavení a hybridní pohon. Předně se tato loď může pochlubit velkým solárním panelem na horní palubě, který průběžně napájí lodní baterie a zároveň slouží jako heliport pro průzkumný dron. Elektrický pohon dále doplňuje záložní spalovací generátor, který přijde ke slovu, když zrovna není dostatek slunečního světla. Prostě hybrid jako Toyota Prius a mnohá další moderní auta.
Dohromady to znamená, že se tento základní plovoucí modul může po vodní hladině pohybovat prakticky nepřetržitě, 24 hodin denně a 7 dní v týdnu, nebo jednoduše dost dlouho, dokud mu nedojdou všechny energetické zdroje. Navíc plně autonomně.
Vzdušný průzkumný dron a plovoucí základna v akci
Plovoucí základna
Samotný plovoucí dron stavěla společnost Eurosecur, tedy alespoň jeho fyzický základ. Kontrolní a ovládací hardware a software dodala parta z ČVUT, která poslední dobou vystupuje pod jednotným označením Fly4Future (zkráceně F4F – fly4future.com). Pro zajímavost, vývoj této plovoucí základny zabral zhruba rok a kousek a to včetně její reálné stavby.
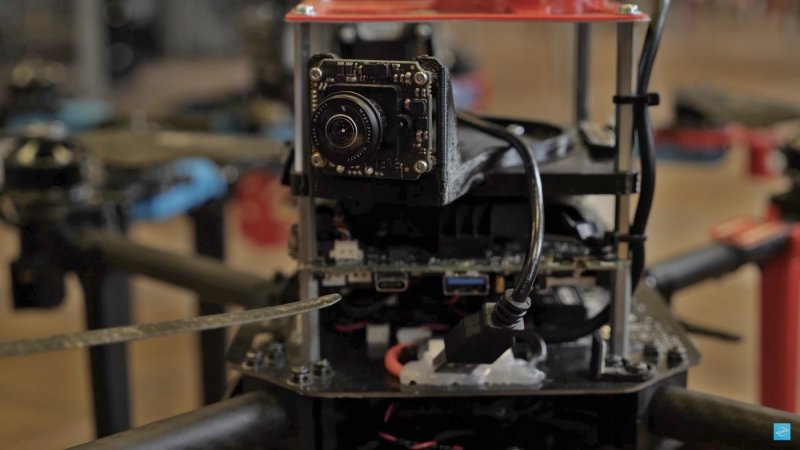
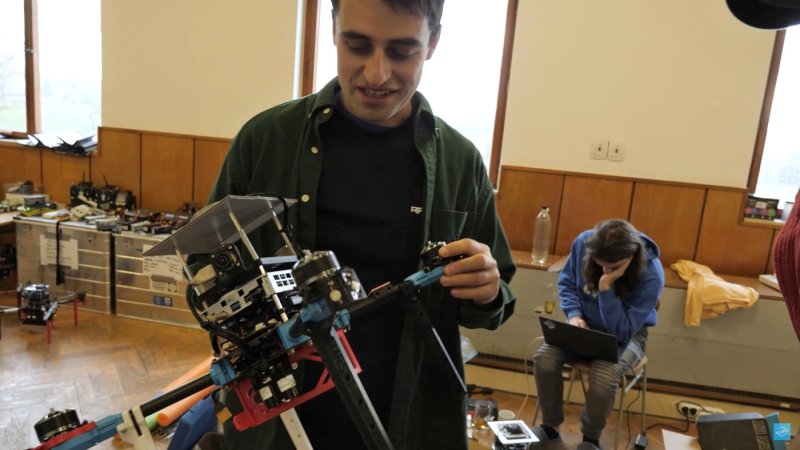
Průzkumný dron
Za zmínku rozhodně stojí i samotný průzkumný dron, který je poslední generací podobného zařízení určeného pro přistání jak na této lodi, tak i přímo na vodě. K tomu ostatně slouží jeho nápadný přistávací rám a karbonové plováky. Tato konstrukce přímo navazuje, nebo spíše nahrazuje starší řešení, u kterého byly plováky uchycené samostatně (vertikálně) na každé noze zvlášť. Starší varianta se ale ukázala jako méně stabilní, navíc se jí docela často lámaly nožky.
Obrazec pro přesné přistání na horní palubě
Jak přistát s dronem na lodi?
Nejednoho čtenáře/diváka jistě napadne otázka, jak je řešeno samotné přistávání na plovoucí loď, na její pohybující se heliport? Odpověď není zcela jednoduchá, jelikož toto řešení nemá jen jednu, ale hned 3 úrovně synchronní navigace.
V první řadě dron i loď využívají klasickou satelitní navigaci (GPS), díky čemuž vědí o své poloze.
Druhou úrovní vzájemné komunikace jsou tzv. UVdary, tedy u lidí z F4F dost oblíbená a často používaná technologie pro vzájemnou komunikaci a lokalizaci dvou a více dronů pomocí UV diod a UV kamer.
Třetí úrovní je obrazová navigace, kdy je na lodní palubě umístěn obrazec připomínající velký QR kód. Ten zaměří kamera na přistávajícím dronu a na jeho střed se snaží dosednout – opět primárně v autonomním režimu. V praxi to vypadá vlastně docela jednoduše a elegantně, ale dopracovat se do tohoto stádia rozhodně nebylo snadné.
TIP pro droní vodomily
Rádi létáte s dronem u vody nebo nadšeně jachtaříte? Přečtěte si článek, jak na jachting s dronem.
Nové UV kamery s výrazně vyšším rozlišením
Hledání a značení kůrovce v lese
Jednu menší mezizastávku, kratší mezipřistání, jsme měli u Matouše Vrby, který nám ukázal a vysvětlil, jak byl měl fungovat opět primárně autonomní dron, který bude vyhledávat kůrovce v potenciálně zasaženém lese a označovat stromy jím napadené. Celé řešení stojí na principu již delší čas testované a průběžně vyvíjené a zdokonalované platformy pro létání v lese (mezi překážkami obecně) pomocí výkonného LiDARu, díky němuž se dron dostatečně orientuje a vyhýbá překážkám.
Systém pro detekci kůrovce by měl následně fungovat zhruba v tom duchu, že dotčený les nejprve z výšky prohlédne dron s multispektrální kamerou, druhý kousek už půjde hledat a lokalizovat konkrétní stromy. Jelikož se přitom kůrovec nachází často v úrovni koruny stromu, měly by být drony v tomto směru výrazně efektivnější než práce lidí.
Matouš Vrba a dron pro hledání kůrovce
Najít vstupní dveře a pak vytáhnout sprej!
Problém každopádně nastává ve chvíli, kdy je nutné hledat a analyzovat drobné závrty v kůře stromu, které jsou neklamnou známkou přítomnosti kůrovce, což není vůbec snadné. Už jen kůra samotná má výraznou strukturu, k tomu musíme připočíst kontrast světlo/stín a další faktory, které přesnou identifikaci drobných „vstupních dveří“ po kůrovci dost znesnadňují.
Poslední úrovní celého úkolu je samotné označení stromu, kdy je na horní straně dronu upevněn „kanón“ s kontrastním sprejem, který má zasažený strom viditelně označit. I tento systém prošel samostatnými testy a zjistilo se, že cesta je to rozhodně funkční, jen se opět musí vychytat nějaké mouchy.
Kanón se sprejem pro označení stromů napadených kůrovcem
Budoucnost dronů od F4F? Vlastní řídicí jednotka na obzoru?
Poslední zastávkou v Alexově tažení za novinkami a inovacemi v rámci ČVUT kempu byla dílna, kde se vše připravuje, sestavuje a ladí. Na tomto místě si Alex odchytil Dana Heřta, z kterého postupně tahal další zajímavé informace. Řeč došla třeba na nečekaný střet s „nežádoucí inovací“ ze strany výrobce řídicích systémů Pixhawk, kdy se verze 6X přestává kamarádit se systémy, které F4F doposud používalo.
Nový Pixhawk 6X totiž stojí na novém firmwaru, který nelze nahradit tím původním. Tato nejnovější verze zároveň přináší mnoho změn, možná až moc, které bohužel generují celou řadu problémů a chyb při spolupráci se systémy F4F. Takže dost otrava a určitý krok zpět, nikoliv dopředu.
Dan Heřt předvádí nejnovější inovace
Proto začínají čeští kluci přemýšlet nad tím, že by si navrhli a nechali vytvořit vlastní řídicí jednotku, která by mohla být poměrně jednoduchá, jelikož bude obsahovat jen a pouze ty funkce a nástroje, které samy využívají a potřebují. Tedy bez zbytečného HW a SW balastu navíc a bez nečekaných updatů nabourávajících dosavadní činnost a vlastní vývoj.
Nakonec jsme se mohli podívat i na vylepšenou verzi UV systému pro vzájemnou komunikaci dronů, která se aktuálně posouvá na novou a výrazně vyšší úroveň. Nejnovější drony F4F totiž dostaly nové UV kamery s několikanásobně vyšším rozlišením a také s vyšší snímkovou frekvencí, díky čemuž je polohová i datová komunikace dronů mezi sebou snazší, přesnější a robustnější. Toto vylepšení sebou ale bohužel nese problémy s výrazným rušením základního GPS signálu, ale i s tím se bojuje pomocí všech myslitelných druhů odstínění.
Tak zase příště u vody s ČVUT! Nebo spíše ve vzduchu?
Taková tedy byla naše aktuální zastávka u vývojové skupiny Fly4Future, alias party z ČVUT (FEL), která nás pravidelně zásobuje novými nápady, konstrukcemi a systémy, díky nimž můžeme kolikrát využít drony způsobem, jaký by nás včera ještě ani nenapadl. Důležitý je samozřejmě také základní výzkum celé droní problematiky, pro nás jsou ale lépe uchopitelné jednotlivé projekty, které postupně plní konkrétní úkoly a mise.
Armáda dronů od ČVUT
Držíme proto této partě všechny pěsti, ať se jim daří jako doposud a nemůžeme se dočkat, až bude zase příležitost podívat se a zaskočit znovu na jejich kemp na čumendu, co je nového.
Většina online tržišť pro piloty končí přesně tam, kde začíná skutečná průmyslová geofyzika. Najít někoho s běžným strojem na nafocení střechy nebo inspekci okapů je dnes otázka pěti minut. Ale zkus poptat operátora s půlmetrovým radarem pro průnik pod povrch země. Zjistíš, že trh zeje naprostou prázdnotou. Přesně do této propasti nyní skáče SPH Engineering se svým novým globálním tržištěm.
Optické senzory a LiDARy narazí na své limity přesně v momentě, kdy je záchranáři potřebují nejvíc. Požár, hustá mlha, zřícená budova plná zvířeného prachu. Můžeš mít na palubě tu nejvymazlenější optiku na trhu, ale jakmile zmizí viditelnost, letíš naslepo. Tým inženýrů z Worcester Polytechnic Institute (WPI) se na tenhle fyzikální problém podíval z úplně jiného úhlu. Místo nekonečného ladění nočního vidění naučili DRON poslouchat okolní prostor.
Běžný přístup k autonomii znamená přidávat další kamery a doufat, že to algoritmus nějak poskládá. WPI na to šli přes biologii a echolokaci. Výsledkem je patnácticentimetrový prototyp kvadrokoptéry, který ignoruje světlo a orientuje se čistě pomocí zvuku.
Zásahy do počasí už dávno nejsou doménou pochybných experimentů nebo riskantních letů s lidskou posádkou. Dnes na to stačí jeden pořádně naštvaný bezpilotní letoun. JOUAV CW-80E je obří VTOL křídlo, které má jedinou misi: donutit mraky pršet, sněžit, nebo je naopak rozehnat dřív, než krupobití zničí úrodu.
Technologie modifikace počasí, známá jako cloud seeding, historicky stála na pilotech, kteří museli vletět přímo do bouřkových mraků. Znamenalo to extrémní turbulence, brutální námrazu a neustálé riziko. Dnes se tahle špinavá práce přesouvá na stroje, které nepotřebují kyslíkové masky ani pud sebezáchovy.
Zásilka už nečeká tiše za dveřmi. Spadne ti na trávník z výšky tří metrů, zatímco nad ní visí osmatřicetikilové monstrum. Amazon se přestal tvářit, že doručování DRONy je jen futuristický experiment pro pár vyvolených nadšenců. Z opatrné testovací fáze se stala chladně kalkulovaná expanze, která právě teď drtí jedno americké město za druhým.
V Nampě ve státě Idaho se právě teď hraje o další logistický uzel. Amazon tam na parkovišti svého stávajícího skladu ukrajuje prostor pro zbrusu nové letecké depo. Žádné zdlouhavé stavění na zelené louce. Vezmou kus asfaltu o rozloze 21 000 čtverečních stop, postaví startovací plochy, provozní budovu, masivní nabíjecí stanice a připraví flotilu patnácti strojů. Výměnou za to obětují „jen“ 114 běžných parkovacích míst.
Nacpat špičkové noční vidění na kompaktní DRON znamenalo donedávna vybírat mezi těžkým monstrem, které ti nekompromisně seřízne letový čas, a levnou mazaninou, na které nepoznáš psa od pařezu. Leonardo DRS tenhle technologický kompromis právě rozštípl. Na floridské výstavě SOF Week 2026 vytáhli z rukávu nový OEM modul Tenum 640 Orbit. A ať už tě zajímá průmyslové létání, inspekce infrastruktury nebo záchranné operace, tohle je přesně ten typ hardwaru, který posouvá limity malých platforem.
Klasické radarové letouny s obřím talířem na zádech mají možná odzvoněno. Společnosti General Atomics a Saab právě úspěšně otestovaly systém včasného varování na bezpilotní platformě a ukázaly světu, jak vypadá budoucnost vzdušného dohledu. Tento krok mění zavedená pravidla hry pro ochranu vzdušného prostoru.
Když potřebuješ hlídat obrovské území, narazíš na limity lidské posádky. Piloti a operátoři potřebují spát, letadlo musí tankovat a provozní náklady letounů typu AWACS létají v astronomických výšinách. Přesně tento problém teď řeší integrace pokročilého radaru na ověřený vojenský DRON.
Zapomeň na doby, kdy se průmyslové motory pájely na koleně a kabely se izolovaly páskou. Hobbywing na istanbulském veletrhu SAHA Expo 2026 jasně ukázal, že budoucnost těžkých letů leží v masivních integrovaných modulech. Technika, kterou známe spíš z výkonných elektromobilů, se právě stěhuje do oblak.
Záchranný tým prohledává Baltské moře. Helikoptéra kroužila dvě hodiny a nic. DRON s novým senzorem EchoGuard našel ztroskotanou loď za dvanáct minut. Čtyři lidé přežili.
Tohle není sci-fi. Tohle je Kodaň, rok 2025, reálný test. A senzor, který to dokázal, stojí méně než slušný ojetý kombík.
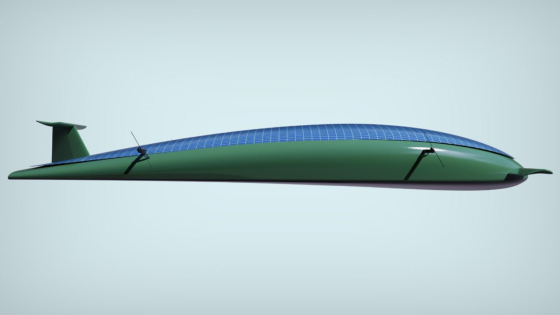
Kontejner plný zboží. Žádná ranvej, žádný přístav, žádná silnice. Jen helium, elektrické motory a umělá inteligence. Zní to jako sci-fi z osmdesátek – jenže kanadská firma Win Global právě dokončila prototyp a první testovací let je naplánovaný na léto 2026.
Projekt se jmenuje DroneShip a my v DRONPRO ho sledujeme od chvíle, kdy se poprvé objevil na radaru. Protože tohle není další powerpointový sen o létajících taxících. Tady jde o reálný hybrid vzducholodi a těžkotonážního DRONu, který chce přepsat pravidla globální logistiky.
Rozbouřená hladina Pacifiku se zavřela a nastalo absolutní ticho. Žádná podpůrná loď na obzoru, žádné kabely, žádné dobíjení a naprostá tma. Kanadská společnost Cellula Robotics právě poslala svůj podvodní DRON Envoy na misi, která s úsměvem přepisuje inženýrské tabulky toho, co autonomní stroje reálně vydrží.